使用软件:AS4.12 + AR E4.93
使用硬件:XEPIMC200.02 + X20BC0083 + X20IF10G1-1 + 汇川IS620N伺服
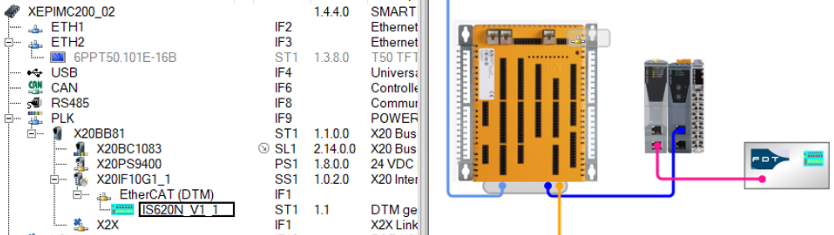
进行X20IF10G1-1配置。
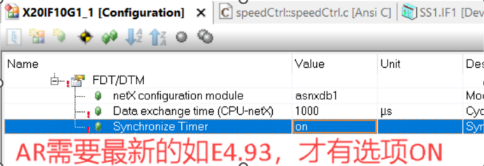
图2 X20IF10G1-1配置
导入汇川IS620N的XML文件。
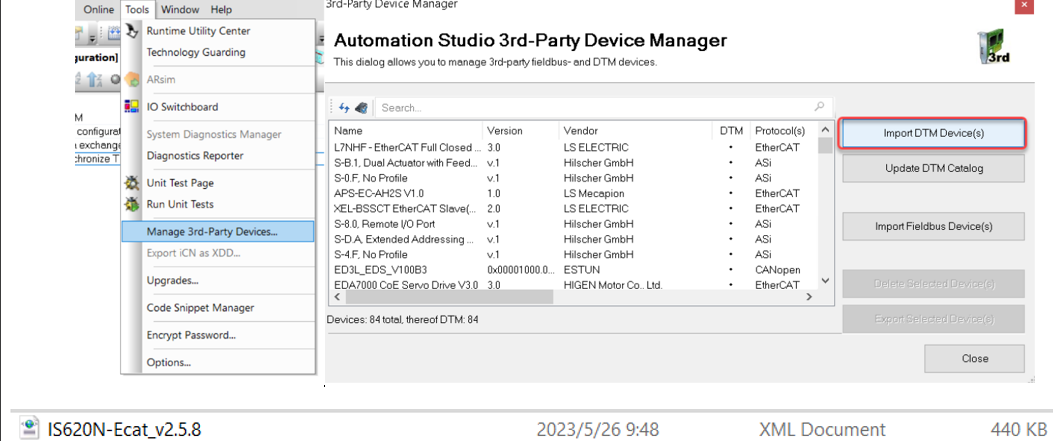
图3 导入Xml文件流程
•添加伺服到总线上
在X20IF10G1-1的总线上就可以添加IS620N_V1_1 EtherCAT drive V1.0 的硬件。
•导入Xml文件后,需要进行总线配置
在X20IF10G1-1的总线上右击Device Configuration
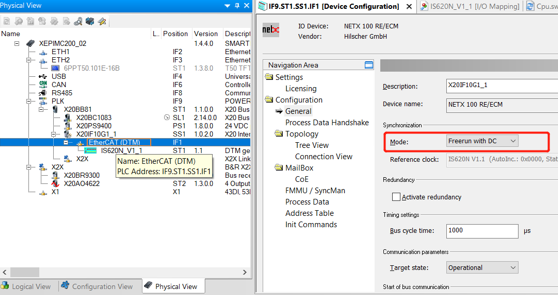
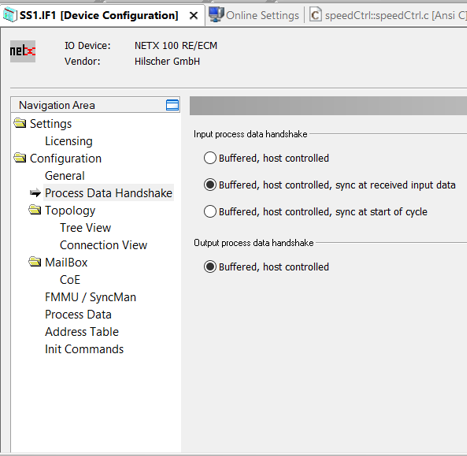
图4 配置X20IF10G1-1模式
•DTM配置RPDO和TPDO
右击Device Configuration,配置对应的PDO,默认有6组已经配置好的POD mapping,但只能在1st received PDOmapping中添加其他PDO
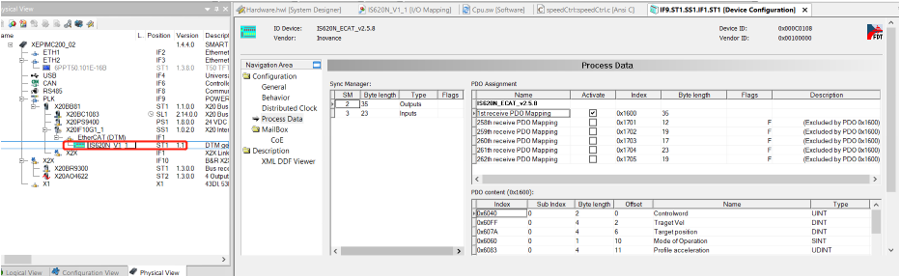
图5 配置xml文件中的PDO
通过查找汇川的说明书以及参考倍福EHTCAT控制汇川伺服的方案中配置的POD,新加PDO列表如下:
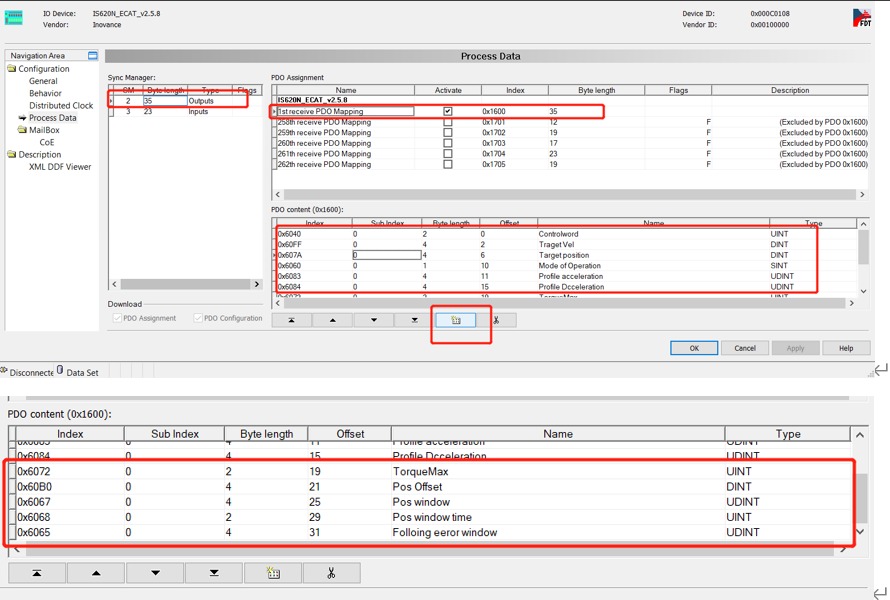
图6 配置输出的PDO
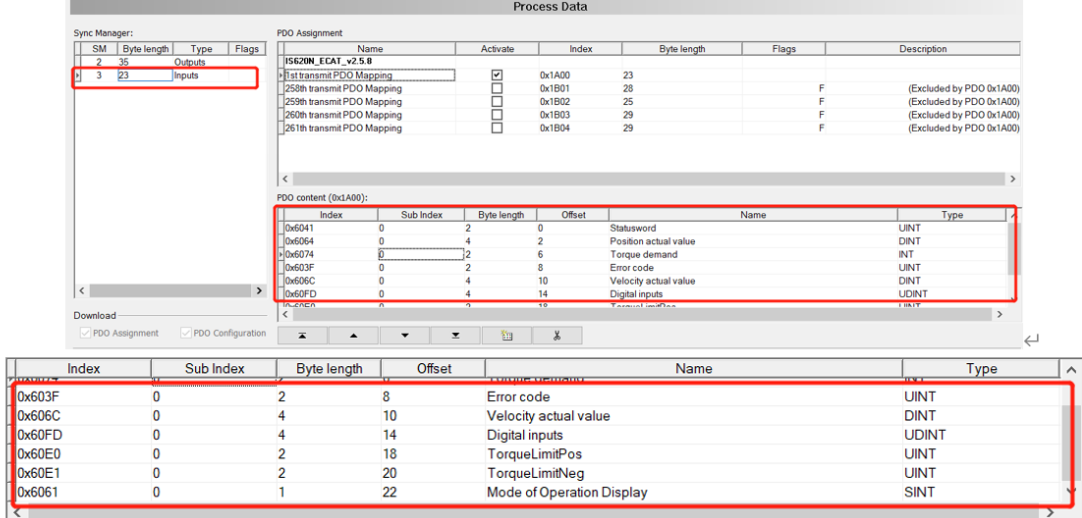
图7 配置反馈的PDO
控制字节命令:0x6040给0110——0111——使能伺服,能进行抱闸命令。
配置控制参数:0x6060,选择模式3,轮廓速度模式,配置0x60FF,目标速度,0x6083、0x6084,加减速度。根据汇川说明书,只需要配置以上参数,即能控制伺服正反转。实际测试中发现,必须把0x6072目标最大扭矩也配置上,才能进行动作。
通过Monitor IO mapping,0x6064能正常读取编码器值,获取电机位置。
注意事项
测试的伺服为汇川IS620N和SV660N。
a、根据汇川说明书:理论上0x6072目标最大扭矩(默认3500)以及0x6065位置偏差值(默认2147483647)属于汇川内部初始化参数,不需要单独添加PDO配置,但实际上两个地址在通过我方PLC正常启动时,由于兼容性问题,有一定几率会刷成0(通过汇川软件监控曲线捕抓到的值),导致伺服无法动作。(倍福控制器与汇川伺服通讯存在兼容性问题的地址是0x6060)
b、0x6065通过反复下载2到3次,能成功让汇川伺服初始化成默认的参数,但0x6072即时反复下载也难以初始化成默认参数,最好通过PDO配置到输出通道中,通过程序写进一个参数(3500)。
c、PDO的输入输出默认只有勾选1st才能进行手动增减通讯地址。
d、使用轮廓速度模式时(3),需要配置以下地址:0x6040控制字节,0x6060控制模式(伺服默认是8,同步位置模式),0x60FF目标速度,0x6083、0x6084目标轮廓加减速度,0x6072目标最大转矩(最好配上)。
e、使用轮廓位置模式时(1),需要配置以下地址:0x6040控制字节,0x6060控制模式(伺服默认是8,同步位置模式),0x607A目标位置、0x6081轮廓速度,0x6083、0x6084目标轮廓加减速度,0x6072目标最大转矩(最好配上),若启动时发现伺服反复报Er.b0.00(位置偏差值过大),则需要重新反复下载(0x6065的初始化值没有在伺服中写进去),直到伺服不报错。
f、控制字节启动步骤为:0x6040,0(0000 0000)——>6(0000 0110)——>7(0000 0111)
g、使用轮廓速度模式时:0x6060需要配置成3,0x6040从7(0000 0111)——>15(0000 1111),设置0x60FF目标速度,0x6083、0x6084目标轮廓加减速度,三个地址的值,伺服即可动作。需要刷新速度时,只需要先让原速度0x60FF变0,再输入新的速度即可。
h、使用轮廓位置模式时:0x6060需要配置成1,0x6040从7(0000 0111)——>15(0000 1111)。这里又分为了绝对位置模式(abs)和相对位置模式(rel)。
i、绝对位置模式(abs):0x6081轮廓速度,0x6083、0x6084目标轮廓加减速度输入设定值,0x607A目标位置的值(需要转换成编码器值),此时把0x6040从15(0000 1111)——>31 (0001 1111),伺服会按照设定的参数往目标位置对应编码器实际位置的值移动。若中途或移动结束后,需要给与伺服新的0x607A目标位置值, 0x6040需要从31 (0001 1111) ——>15(0000 1111)——>31 (0001 1111),新的目标位置值才能刷新到伺服中。
j、相对位置模式(rel):0x6081轮廓速度,0x6083、0x6084目标轮廓加减速度输入设定值,0x607A目标位置的值(需要转换成编码器值),此时目标位置的值指相对移动的距离的值,接下来把0x6040从7(0000 0111)——>79 (0100 1111) 伺服会接收设定的参数,然后从79(0100 1111)——>95 (0101 1111),伺服会按照设定的参数往目标位置相对编码器实际位置的值移动。若中途或移动结束后,需要给与伺服新的0x607A目标位置值, 0x6040需要从95 (0101 1111) ——>79(0100 1111)——>95 (0101 1111),新的目标位置值才能刷新到伺服中。
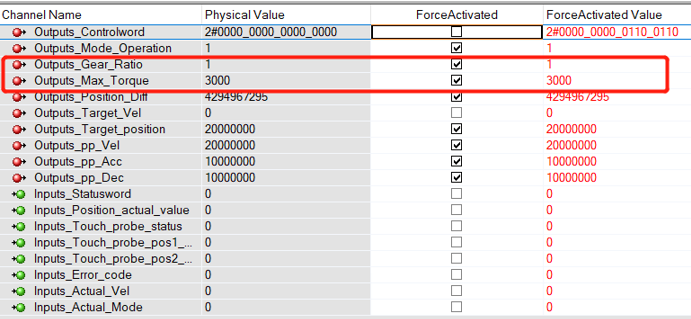
图9 轮廓位置模式中配置的PDO
k、轮廓速度模式转换成轮廓位置模式,除了模式更改,0x6040需要先回到7(0000 0111),然后回到——>15(0000 1111)或——>79 (0100 1111)。
l、轮廓位置模式转换成轮廓速度模式,除了模式更改,0x6040需要先回到7(0000 0111),然后回到——>15(0000 1111)即可。
尝试通过程序配置SDO参数,按照EthCat主站测试文档中说明,需要添加库:AsNxEcM,并调用功能块nxecmSdoRead 、nxecmSdoWrite进行SDO的配置和读写,但实际测试中均未能成功,报错code并未在帮助中找到。也未能找到文档中说的例程,因此SDO读写的测试未成功。