背景说明
该测试基于X20IF10G1-1的伺服通讯测试 Ethercat主站模块X20IF10G1-1测试及汇川伺服Ethercat通讯报告
测试过程
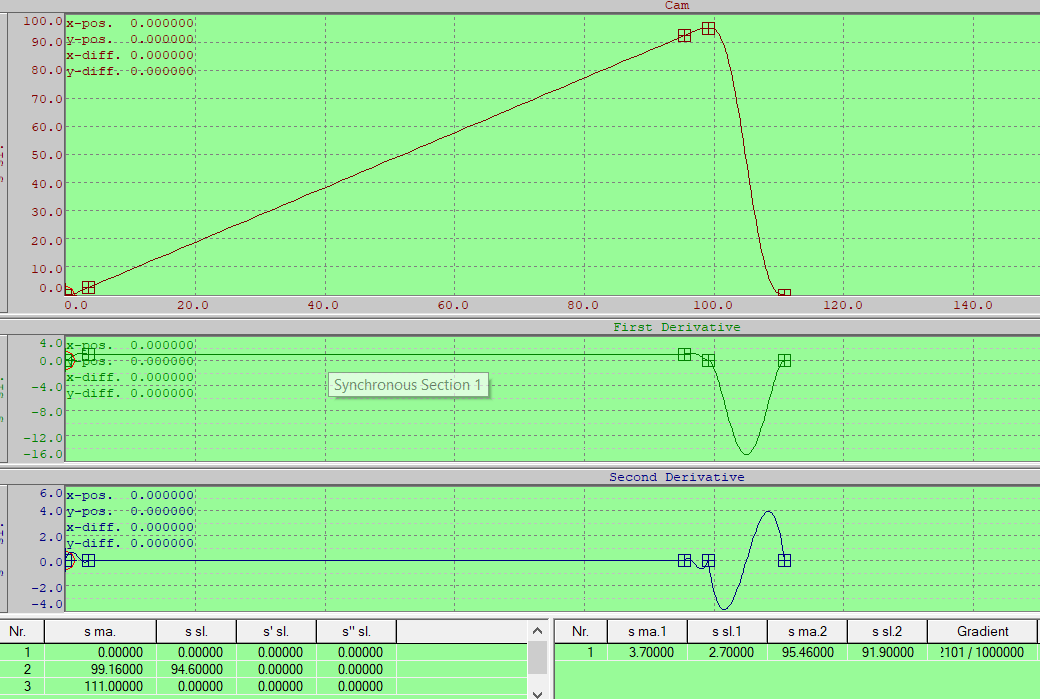
通过SDC实现主从轴如下图所示的Cam曲线方式的运动,通过更改Ethercat同步周期以及SDC程序循环时间对比Lag error以及实轴虚轴位置偏差方式确认同步情况;最后对比powerlink通信micro系列伺服同步情况。
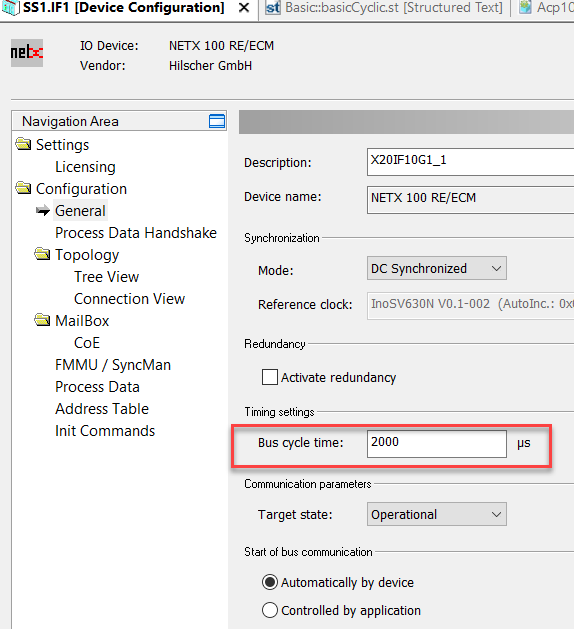
EtherCAT配置同步模式,同步模式配置方法参考 Ethercat主站模块X20IF10G1-1测试及汇川伺服Ethercat通讯报告
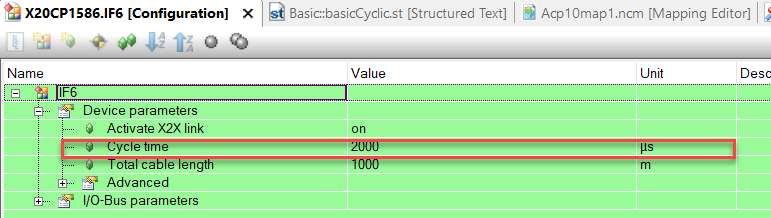
通讯周期须与X2X循环周期一致;SV630N伺服周期为125us,ethercat通讯周期最小250us;须配置EtherCAT同步周期为最小ethercat通讯周期整数倍,最低500us;同时由于Idle time的存在,sdc循环时间至少为通讯周期的两倍。
X2X时间
EtherCAT主站通讯周期
循环Idle time
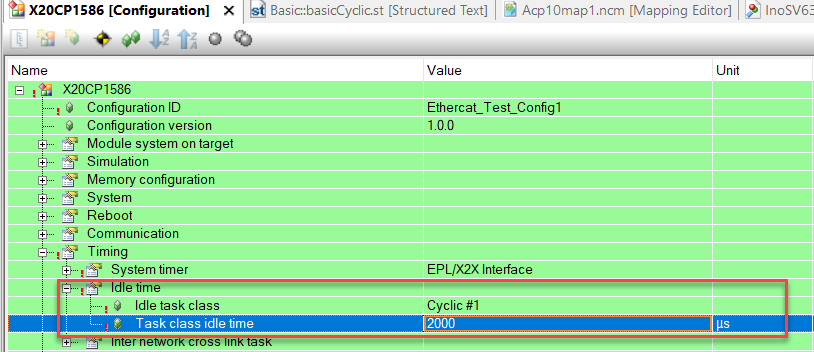
程序循环时间
测试环境
硬件:cpu:X20CP1586 通讯模块X20IF10G1-1 驱动器*2:SV630N 电机*2:MS1H1-4083CB
软件:AS4.12 AR:E4.93
测试结果
所有轴控程序(实虚轴)循环层级20ms,伺服编码器3600units每圈,设置主轴速度1000units/s,从轴做cam曲线同步运动;同步段速度997units/s,最高速度达到15000units/s。采样周期0.003s, 测试结果如下
测试内容 |
通信周期 |
SDC循环周期 |
测试结果 |
EtherCAT控SV630N |
500us |
1ms |
同步段 Lag error:1 实虚偏差:20 尖峰速度 Lag error:18 实虚偏差:300 |
EtherCAT控SV630N |
500us |
2ms |
同步段 Lag error:3 实虚偏差:20 尖峰速度 Lag error:40 实虚偏差:300 |
EtherCAT控SV630N |
2000us |
4ms |
同步段 Lag error:15 实虚偏差:20 尖峰速度 Lag error:222 实虚偏差:300 |
EtherCAT控SV630N |
2000us |
10ms |
同步段 Lag error:24 实虚偏差:20 尖峰速度 Lag error:350 实虚偏差:300 |
POWERLINK控micro |
2000us |
无 |
同步段 Lag error:6 实虚偏差:1 尖峰速度 Lag error:9 实虚偏差:6 |
结果分析
测试通过软件使用SDC方式硬件采用EtherCAT主站模块X20IF10G1-1控制EtherCAT第三方伺服,并实现两个EtherCAT伺服的主从轴跟随运动观察同步情况;通过更改Ethercat同步周期以及SDC程序循环时间观察Lag error以及实轴虚轴位置偏差方式确认同步情况,并对比Powerlink控制贝加莱micro系列伺服的同步效果。
通过Powerlink通讯控制贝加莱micro系列伺服虚轴位置发生器在程序中计算,实轴位置发生器在伺服中计算;实轴落后虚轴1个伺服周期,为400us。由于实轴位置发生器在伺服中计算,且伺服中存在补偿,Lag error并未出现SDC通过EtherCAT控第三方伺服的线性误差,随着速度变化也可以控制在3600units一圈情况下10以下的误差范围内。
通过EtherCAT通讯控制EtherCAT第三方伺服虚轴位置发生器在程序中计算,实轴编码器信号通过通讯传至SDC程序中处理,并在轴控程序循环更新当前实际位置;实轴落后虚轴1个轴控循环周期,为20ms。由于受通讯周期以及SDC程序循环时间影响,Lag error存在系统性误差,理论最小可实现的通讯周期500us和sdc程序1ms下Lag error大约0.13%;可与powerlink周期保持一致的最小通讯周期2000us和sdc程序4ms下Lag error大约1.5%。
测试内容 |
EtherCAT控第三方伺服 |
POWERLINK控micro |
Lag error |
与powerlink周期保持一致的最小通讯周期2000us和sdc程序4ms下Lag error大约1.5% |
3600units一圈情况下10以下 |
实虚轴偏差 |
轴控程序循环时间的位置偏差 |
伺服循环时间的位置偏差 |
附件
测试程序(ethercat汇川伺服配置)例程下载___EtherCAT_SV630N_1117