1.测试环境
•AS:4.12
•AR:E4.73
•PLC: X20CP1586
•Servo:SV630N * 2
•Motor:MS1H1-10B30CB *2
2.AS配置步骤
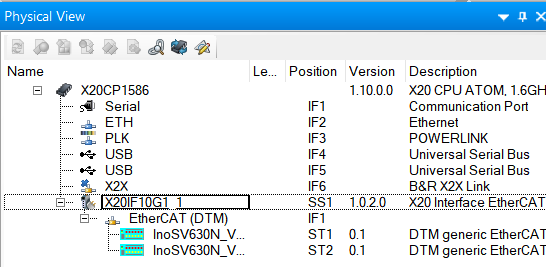
•参考上文配置第三方设备Ethercat通讯步骤:创建项目,添加汇川伺服XML格式文件。硬件拓扑添加X20IF10G1-1模块作为通讯主站后添加第三方Ethercat从站,并设置从站站点号
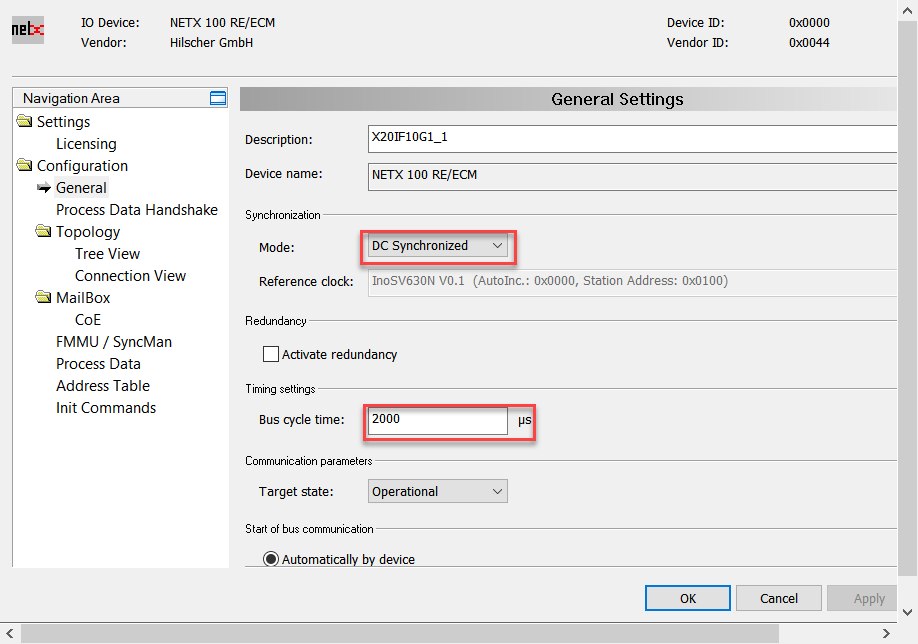
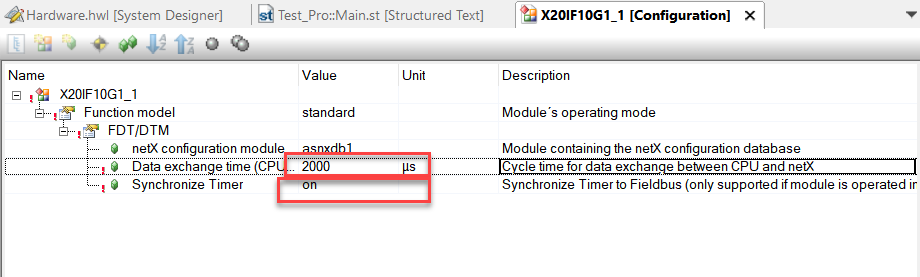
•参考上文配置同步模式方法配置成同步模式,循环时间2000μs
•配置通道
Ethercat主从站间PDO数据交互如下图所示:
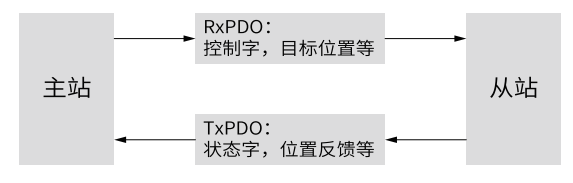
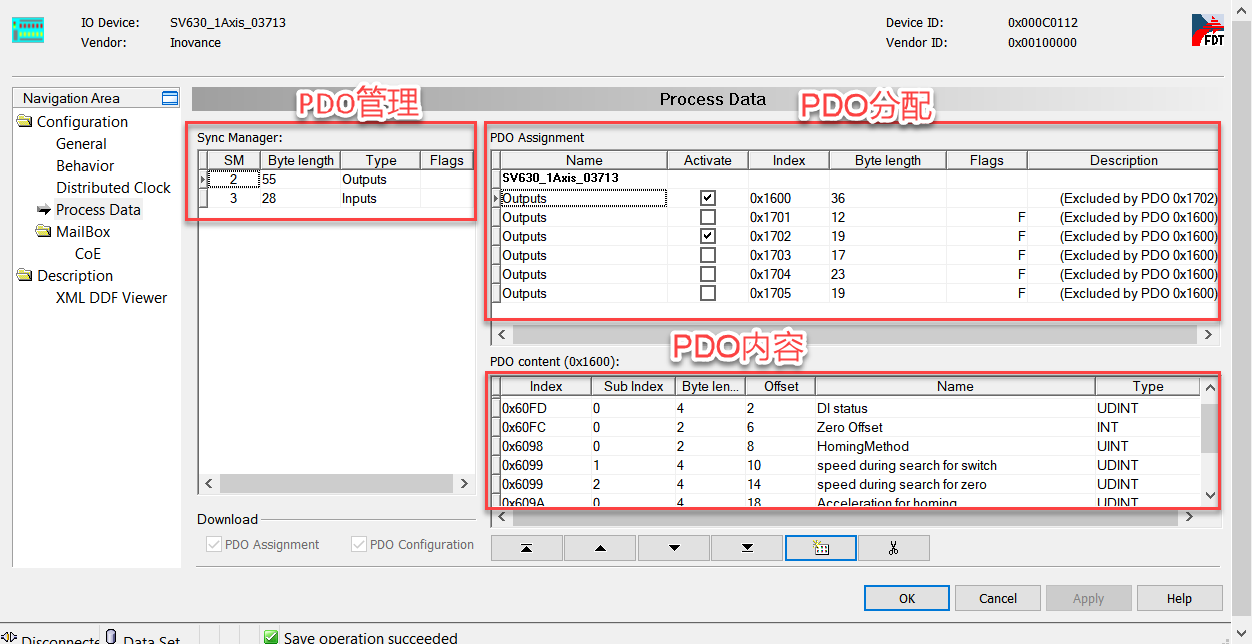
SV630N从站的Process Data本身已有配好的输入输出PDO通道,可直接勾选调用,想再配新通道可在提供的1 个可变的RPDO 和1 个可变的TPDO中分配:PDO分配界面第一个栏目下自行参考伺服配置说明配置,如16#60FD通道对应DI状态。注意映射对象字节不可超过40byte,映射超限会导致驱动器报错。
3. 汇川伺服配置步骤
汇川伺服Ethercat通讯符合IEC 61158 Type 12, IEC 61800-7 CiA 402 Drive Profile标准。在SV630N 伺服驱动器中,采用的是IEC 61800-7 (CiA402)-CANopen 运动控制子协议。
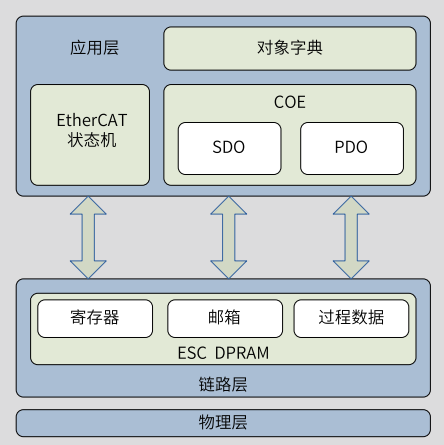
下图是基于CANopen 应用层的EtherCAT 通讯结构以及CiA402状态机切换图。结构图中,在应用层对象字典里包含了:通讯参数、应用程序数据,以及PDO 的映射数据等。PDO 过程数据对象, 包含了伺服驱动器运行过程中的实时数据,且以周期性地进行读写访问。SDO 邮箱通讯,则以非周期性的对一 些通讯参数对象、PDO 过程数据对象,进行访问修改。

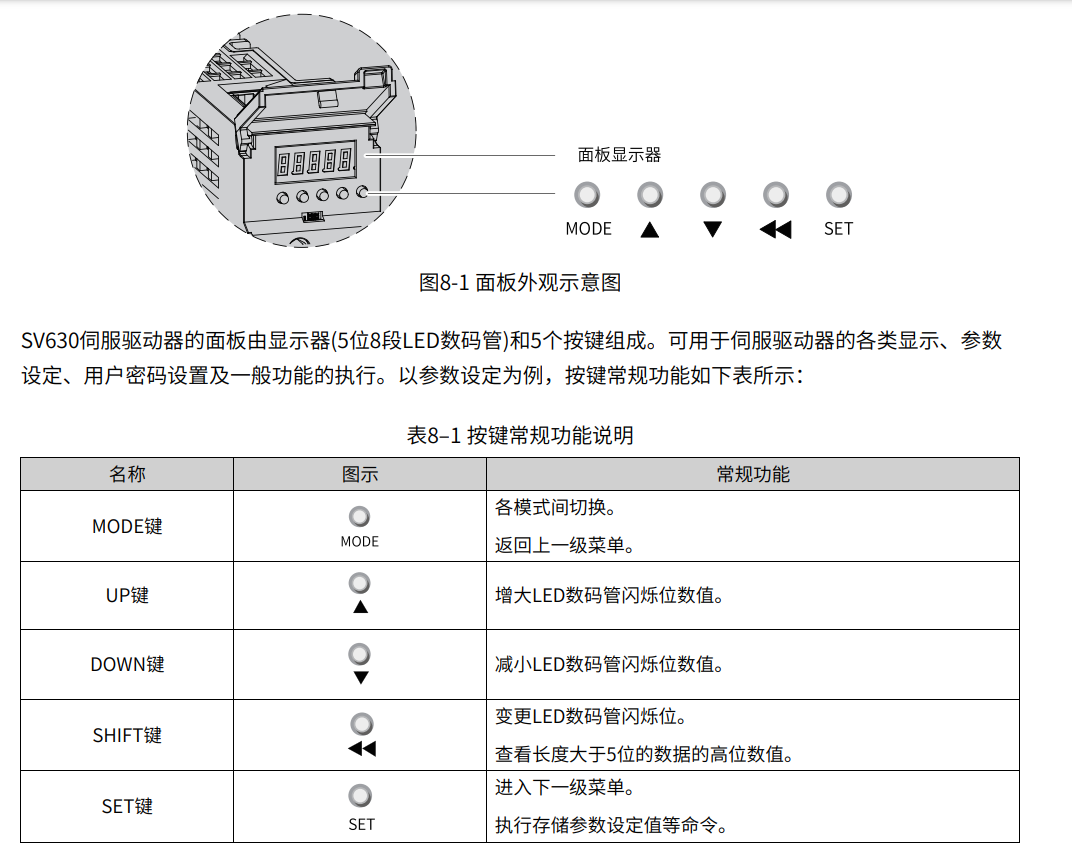
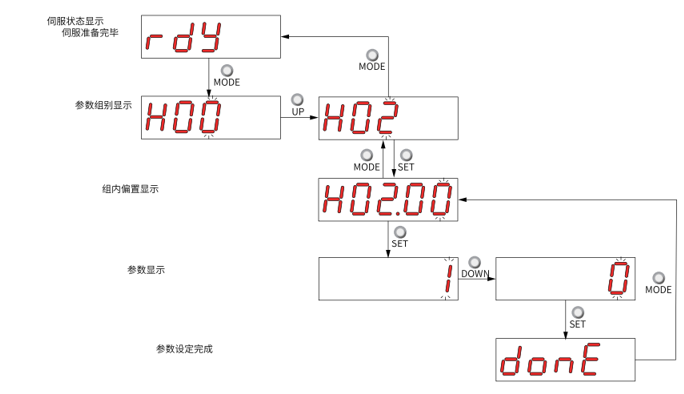
汇川伺服共有状态显示、参数显示、监控显示、故障显示四种模式可切换,相关参数设置可通过汇川 Inodrivershop 软件进行相关参数设置,也可通过伺服上的操作按钮进
行设置,伺服上操作按钮说明以及修改参数方式如下:
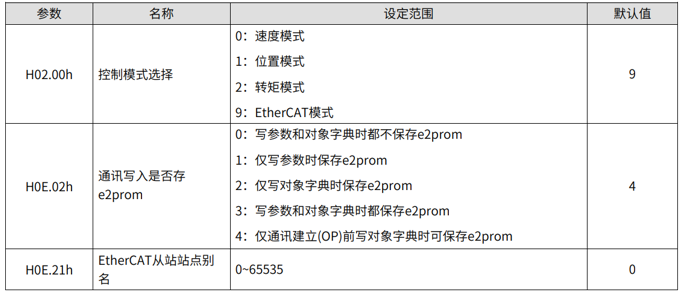
Ethercat相关参数配置如下,因默认值符合测试流程,其他不作更改,只需调整伺服站点号与程序匹配。
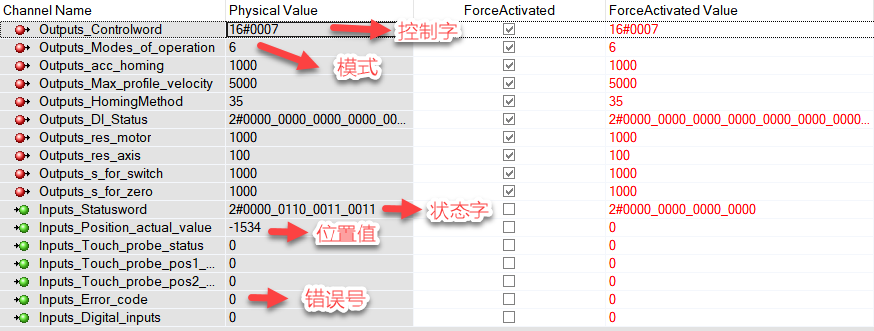
导入程序后watch对应伺服的IO mapping,通过所开设的PDO通道映射来控制当前伺服运动状态。